Electronic Navigational Aid for the Blind (ENA)
Overview
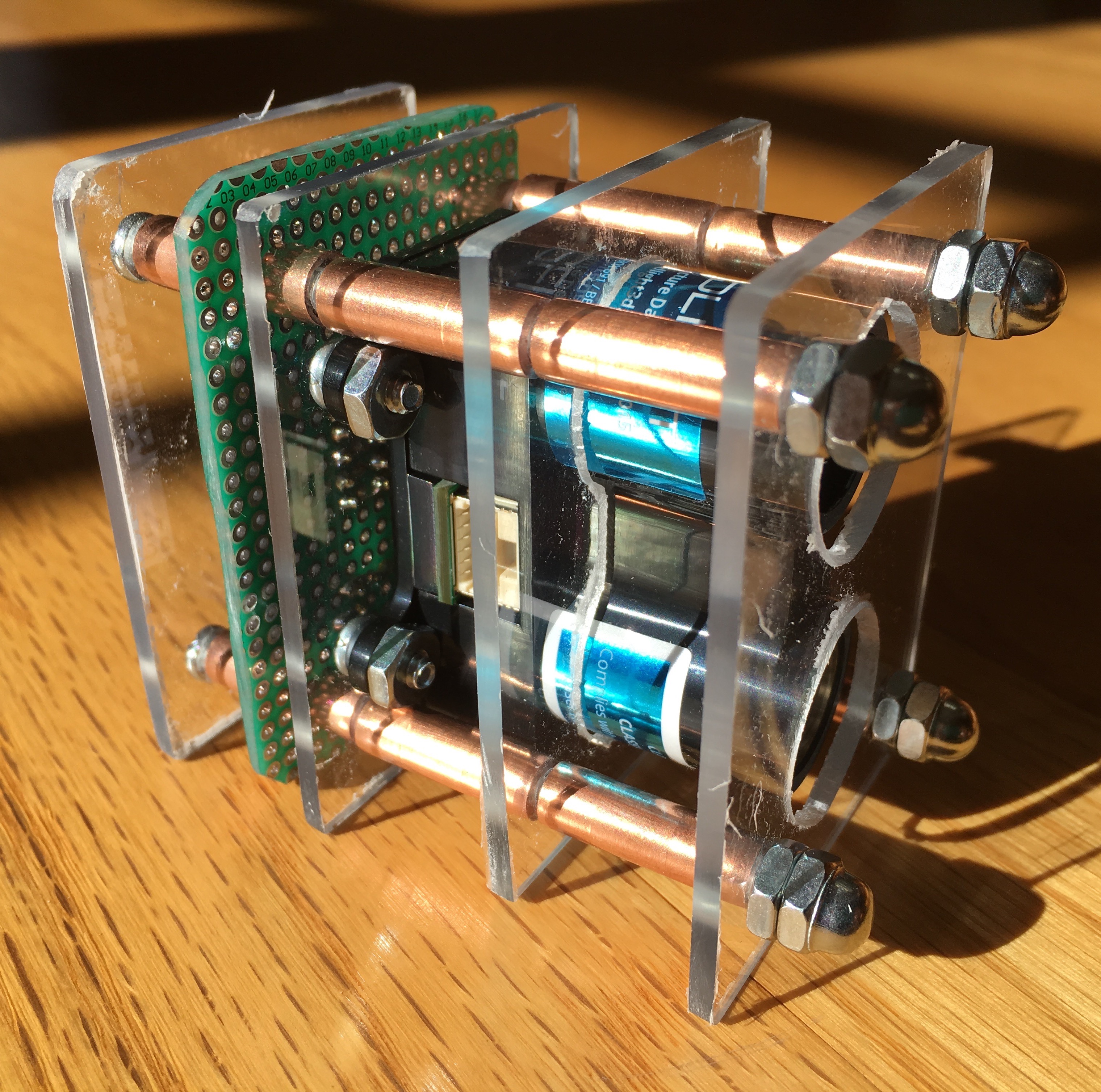
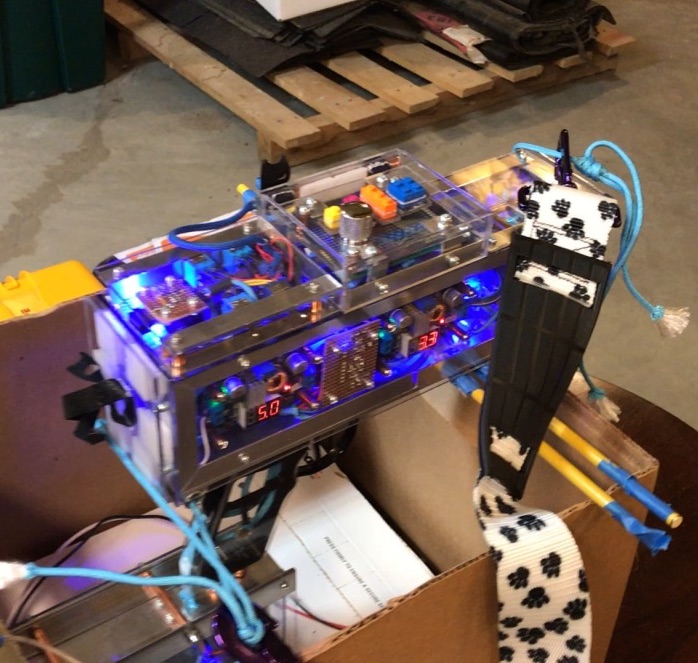
This project was done as part of a three year program at my high school, the Authentic Science Research program. In the program, students got to pick a topic and then come up with a research project of their own to work on with a mentor in the field for three years, submitting to various competitions at the end of the journey. As a sophomore who was just beginning the program, I knew that I wanted to do something in the field of engineering, but I didn't know what. The worlds of popular culture and invention often intersect. For instance, the design of the flip phone was based on the Star Trek communicator. My project was similarly based on a piece of science fiction media. While I was contemplating the future of my project, I happened to catch an episode of the USA original series Covert Affairs. On the show, a CIA agent named Auggie uses a laser cane apparatus to navigate. While the laser cane on the show is pretty clearly a laser pointer prop, I started thinking about the possibiity of such a device in the real world. The result was my hand-held electronic navigational aid. I enterred this project into the Regeneron Science Talent Search (STS), where I was a semifinalist scholar, and the International Science and Engineering Fair (ISEF), where I was a finalist.

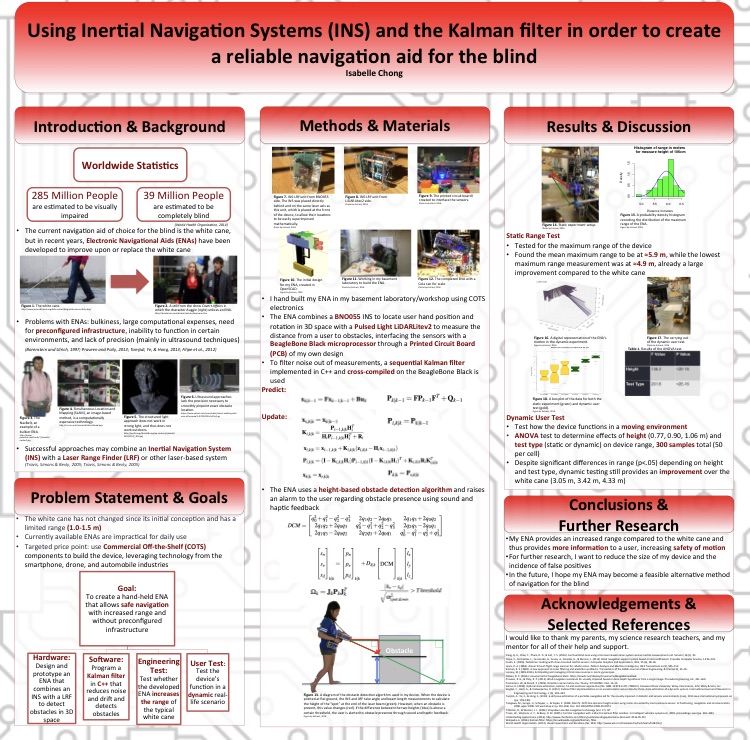
The current navigation aid of choice for the blind is the white cane, which, although lightweight and easy to acquire, has a limited range and requires extensive training to use. While Electronic Navigational Aids (ENAs) have been developed to improve upon the white cane, the need for certain environmental conditions and preconfigured infrastructure in some approaches (e.g., radio frequency identification and structured light) remains an issue. My objectives were to (1) design the conceptual and mathematical methodology of an ENA for device location and obstacle detection without the use of preconfigured infrastructure, (2) build an ENA by combining a Laser Range Finder (LRF) and an Inertial Navigation System (INS), (3) code a real-time algorithm for obstacle detection and Kalman filtering in C++, and (4) test my ENA’s functionality from both an engineering and human subjects standpoint to obtain quantitative and qualitative feedback. The completed ENA can detect obstacles within a six meter range without preconfigured infrastructure, raising an alarm to the user through sound and haptic feedback if an obstacle has been detected. This device has the potential to provide a robust alternative method of blind navigation in the future.